Introduction
I recently entered a Robot Wars competition for the Bristol Electrical and Electronic Engineering Society (BEEES) with two of my course friends, in which we designed and built a robot to battle. The Robots are in the antweight category and therefore have size (must fit in a 4X4″ Box) and weight (no more than 150 grams for a roller robot and 225 grams for a walker robot) restrictions. A roller robot is a robot in which its final output movement is greater than 180 degrees, whereas a walker robot has its final output movement that is less than 180 degrees. There was also an option to make a cluster bot which consists of two or more smaller robots that have a combined weight of 150 grams.
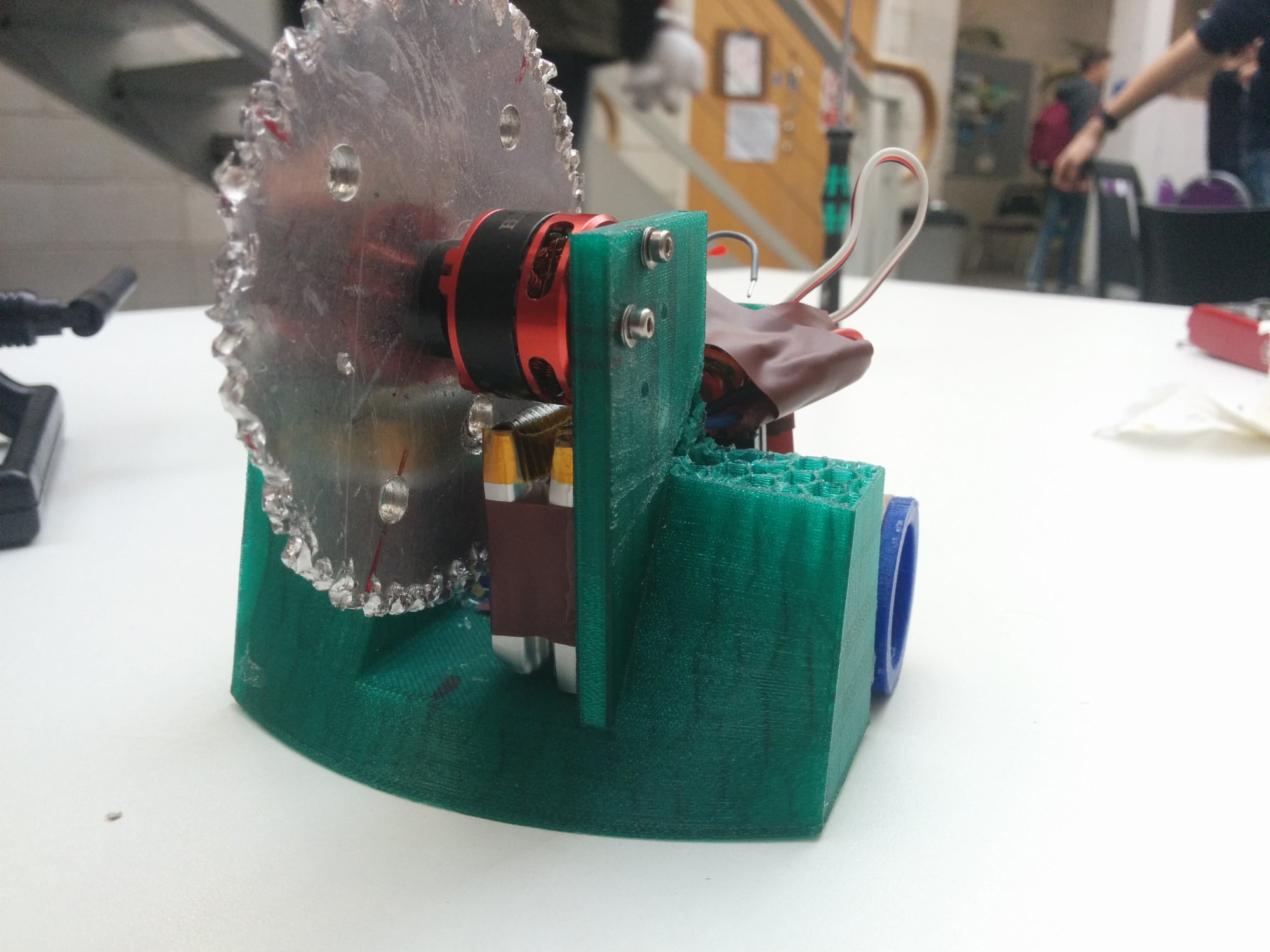
We decided to make a roller robot with a spinning metal disk as a weapon for destroying fighting other robots. We would have opted for a more advanced weapon but the antweight rules restricts the use of fire, electricity, glue, anything fun etc. The process below shows how we constructed the robot in the weeks prior to the competition.
Project Build
We were given a receiver and transmitter from the BEEES Society. In addition to this we acquired some 3V batteries to power the transmitter.


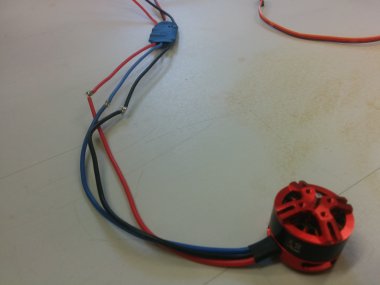
We also collected a couple servos to control the two rear wheels. In addition, a speed controller was used along with a DC motor to control the rotation of the metal disk.


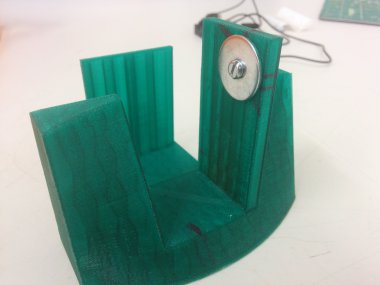
The body of the robot was modelled in CAD and then exported to a 3D printer.


The body of the robot along with the wheels were printed simultaneously in several hours.


The wheels of the robot were checked to make sure that they aligned with the base. After they were printed, excess material was chiselled off of the wheel from where it had been attached to the printer’s base.


Two of the servo attachments were sanded down so that they could fit into the inner circumference of the wheels.

A metal mount for the DC motor was added to the base and the speed controller was soldered to the DC motor.
The metal blade was attached to the motor and several holes were drilled into it in order to reduce its weight.


Certain connections were fixed with electrical tape in order to strengthen them when the robot moved and protect them from the metal blade.


The batteries were attached next to the blade and excess material on the sides of the robot were cut off as the overall weight of the robot was just above the threshold weight.

The arena was set and the battles commenced!

